Võrdluskaart
| Võrdluse alus | Star Topoloogia | Võrgusilma topoloogia |
|---|---|---|
| Organisatsioon | Perifeersed sõlmed on ühendatud keskussõlmega (nt jaotur, lüliti või ruuter). | See sisaldab vähemalt kahte sõlme kahe või enama tee vahel. |
| Paigaldamine ja ümberkonfigureerimine | Lihtsam | Raske |
| Maksumus | Võrreldes vähem | Kallis tänu ulatuslikule kaabeldusele. |
| Tugevus | Kesktase | Väga tugev |
| Kaabeldusnõuded | Kasutab keerdpaarikaableid, mis katavad kuni 100 meetri kaugust. | Keeratud paar, koaksiaalne, kiudoptiline kaabel, olenevalt võrkude tüübist võib kasutada mis tahes kaabli tüüpi. |
| Marsruutimehhanism | Kogu informatsioon suunatakse keskvõrguühendusest. | Teave suunatakse otse ühest seadmest teise. |
| Keerukus | Lihtne | Üsna keeruline |
| Skaalautuvuus | Hea | Vaene |
Tärnide topoloogia määratlus
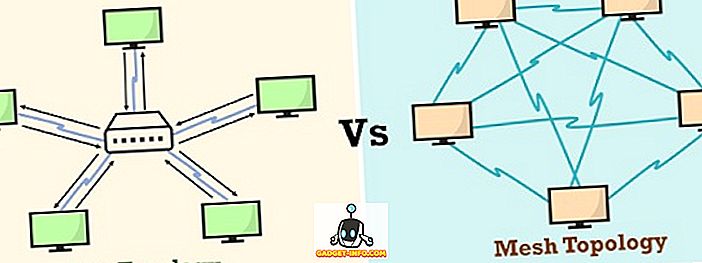
Star-topoloogia ühendab kõik lõpp-seadmed otse ühise kesksõlmega. Kesk-kontrollerit, mis on ühendatud kõigi teiste seadmetega punkt-punkt-linkide kaudu, nimetatakse täht-siduriks . Andmete vahetamise rakendamiseks ei toimu vahendi vahendusel seadmete vaheline liiklus, vaid täheühendus. Kui seade tahab teisele seadmele andmeid edastada või saata, peab see eelnevalt edastama andmed keskregulaatorile. Seejärel edastab keskregulaator andmed soovitud sihtkohta.
Keskjuhtimispult võib töötada kahel viisil:
- Esimesel lähenemisviisil võib see edastada raame kesksõlmele ja seejärel edastada keskne sõlme kõikidele välistele linkidele nii, et see jõuaks lõpliku sõlmeni. Selles stsenaariumis näeb võrgusõlmede organiseerimine olevat füüsiliselt täht, kuid need on ühendatud bussi topoloogiaga, kus kõik teised sõlmed saavad edastatud andmed.
- Teine lähenemine hõlmab lülitus- ja marsruutimisfunktsioone, kus keskne tähtklemm toimib kaadri-lülitusseadmena. Sellises tüübis puhverdab keskne sõlme saabuva kaadri ja edastab selle seejärel sihtsõlmele.
Tärn topoloogia võimaldab kiiret andmeedastust, eriti kui keskregulaatorit kasutatakse lülitina. Siin on linkide arv võrdne sõlmede arvuga. See topoloogia on teiste topoloogiatega võrreldes paindlik ja tõhus.
Võrgusilma topoloogia määratlus
Võrgu topoloogia seob sõlme selliselt, et iga sõlme seotakse teise sõlme külge spetsiaalse punkti-punkti lingi kaudu. Seetõttu loob see n (n-1) / 2 lingid n sõlmede arvu ühendamiseks, mis on natuke liiga palju. Sõlmede ühendamiseks kasutatava kandja vorm võib olla keerdpaar, koaksiaal- või optiline kiud. Seda tüüpi topoloogia ei nõua täiendavat teavet paketi kohta, näiteks lähteaadressi või sihtkoha aadressi, sest kaks sõlme on otse ühendatud.
Võrgu topoloogia paindlikkus on väga madal ja selle skaleeritavustegur on halb. See nõuab linkide paigaldamist uue sõlme lisamiseks, et uus sõlme saaks ühendada iga olemasoleva sõlme külge. See on põhjus, miks see on väga kallis topoloogia.
Tärnide ja silmade topoloogia vahelised peamised erinevused
- Star-topoloogia korraldab sõlmed tähtkuju, kus keskne jaotur on ühendatud kõigi teiste sõlmedega. Teisest küljest on võrgusilma konfiguratsioonis ühendatud iga sõlme teine sõlme.
- Lihtne paigaldamine ja ümberkonfigureerimine on võimalik tähe topoloogias. Seevastu võrgusilma puhul on vaja rohkem ülekandekandjaid, pingutusi ja paigaldamise ja ümberkonfiguratsiooni aega.
- Star topoloogia on mõningal määral kulutasuv, samas kui võrk on kallis.
- Tärn topoloogial on puudus, kui mittetöötav keskpunkt võib muuta kogu süsteemi töövõimetuks. Vastupidi, võrgusilma topoloogia on tugevam kui tähe topoloogia.
- Täht topoloogia kasutab edastuskandjatena ainult keerdpaarikaablit. Seevastu võrgusilma võib kasutada mis tahes ülekandekandjat, nagu keerdpaarkaabel, koaksiaalkaabel või optiline kiud, kuid see nõuab rohkem kaabeldamist.
- Tähe topoloogia paindlikkus ja mastaapsuse tase on hea, samas kui võrgusilma topoloogia on vähem skaalautuv, kuna see suurendab otseselt süsteemi kulusid.
- Võrgusilma topoloogia on tähe topoloogiaga võrreldes keeruline.
- Tärni topoloogia marsruutimine toimub täheühenduse abil. Vastupidi, võrgusilma topoloogia edastab andmed otse ühelt sõlmedelt teisele, kasutades punkti-punkti linki.
Star Topoloogia eelised
- See vähendab pakettide ülekandmist liigsetest sõlmede arvust.
- Noodid on üksteisest isoleeritud.
- Keskne jaotur hõlbustab uute seadmete lihtsat lisamist.
- Seda on lihtne mõista, paigaldada ja navigeerida.
- Vale osa saab kergesti avastada ja kõrvaldada.
- Seadmete lisamise ja eemaldamise ajal on see tasuta.
Võrgusilma topoloogia eelised
- Võrgu topoloogia sõlmede organisatsioon aitab rohkem kui ühes andmete edastamises ühest sõlmedest üheaegselt.
- Pakub privaatsust ja turvalisust punkt-punkt-linkide vahel.
- See on tugev, ühe lingi rike ei mõjuta teist süsteemi.
- Vea tuvastamine ja eraldamine on samuti lihtne.
Star Topoloogia puudused
- Süsteemi toimimine sõltub suuresti keskpunktist.
- Keskmise jaoturi mis tahes aegumine võib põhjustada kogu süsteemi töövõimetuse.
- Skaalautuvuus sõltub keskjaama võimekusest.
Võrgusilma topoloogia puudused
- See võrgukonfiguratsioon võib luua üleliigseid võrguühendusi, kuna mõned ühendused on kasutud.
- Samuti suureneb topoloogia üldkulud kaabli liiga suure hulga ja i / o-portide vajaduse tõttu.
- Juhtmed on keerulised.
Järeldus
Star-topoloogia on kulude seisukohalt tõhus, samas kui võrgusilma on hea valik, kui probleemiks on andmeedastuse turvalisus ja kiirus.