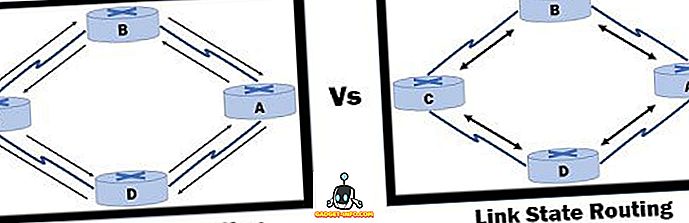
Eelmine erinevus vahemaa vektori ja lingi oleku marsruutimise vahel on see, et kaugusevektoris ruuteri suunamine jagab teadmisi kogu autonoomsest süsteemist, samas kui lingi olekus ruuter jagab autonoomses süsteemis ainult nende naaberreitijate teadmisi.
Võrdluskaart
| Võrdluse alus | Kaugus vektori marsruutimine | Link riigi suunamine |
|---|---|---|
| Algoritm | Bellman ford | Dijsktra |
| Võrgu vaade | Topoloogia teave naabri seisukohast | Täielik teave võrgu topoloogia kohta |
| Parima tee arvutamine | Väikseima humalaarvu alusel | Kulude alusel |
| Uuendused | Täielik marsruutimislaud | Link riigi värskendused |
| Värskendab sagedust | Perioodilised uuendused | Käivitatud uuendused |
| CPU ja mälu | Madal kasutamine | Intensiivne |
| Lihtsus | Kõrge lihtsus | Nõuab koolitatud võrguadministraatorit |
| Lähenemisaeg | Mõõdukas | Kiire |
| Uuendused | Saate | Multicastil |
| Hierarhiline struktuur | Ei | Jah |
| Vahesõlmed | Ei | Jah |
Kauguse vektori marsruutimise määratlus
Kaugvektorite marsruutimises ei pea ruuter teadma kogu võrgusegmendi kogu teed; see nõuab ainult paketi saatmise suunda või vektorit. See meetod määrab suuna (vektori) ja kauguse (hop count) mis tahes võrgus olevasse võrku.
Kaugvektorite marsruutimisalgoritmid saadavad perioodiliselt kõik oma marsruutimislauad või nende osad oma naabritele. Kaugvektori marsruutimisprotokolli kasutavad ruuterid saadavad automaatselt perioodilisi värskendusi ka siis, kui võrgus muudatusi ei toimu.
Ruuter saab kontrollida kõiki teadaolevaid marsruute ja muudab oma kohalikku marsruutimistabelit naabruses asuvast marsruutimisest saadud ajakohastatud teabe põhjal. Seda protsessi nimetatakse „kuulujutuks rumorina”, sest marsruuteri informatsioon, mida ruuteril on võrgu topoloogiast, põhineb naabervõrgu marsruuteri marsruutimistabeli perspektiivil.
RIP ja IGRP on tavapäraselt kasutatav kaugus vektorprotokoll, mis kasutab hop-loendusi või selle marsruutimismeetodeid.
Linki riigi marsruutimise määratlus
Linkide oleku marsruutimisel püüab iga ruuter luua oma sisemise topoloogia võrgukaardi. Käivitamise algstaadiumis, kui ruuter aktiveerub, saadab ta sõnumid võrku ja kogub teavet ruuteritest, millele see on otseselt ühendatud. Samuti annab see teavet selle kohta, kas marsruuterini jõudmine on aktiivne või mitte. Seda teavet kasutavad teised ruuterid võrgu topoloogia kaardi loomiseks. Seejärel kasutab marsruuter kaarti parima tee valimiseks.
Lingi oleku marsruutimisprotokollid reageerivad võrgu muutustele kiiresti. See saadab käivitatud värskendused, kui võrgus muutub, ja saadab perioodilisi uuendusi pika ajaintervalliga nagu 30 minutit. Kui link muudab olekut, genereerib seade ja tuvastab selle muutmise kohta värskendussõnumi kõigi marsruuterite kohta. Seejärel võtab iga ruuter värskendussõnumi koopia ja värskendab oma marsruutimistabeli ning edastab sõnumi kõigile naaberreitijatele.
See värskendussõnumi üleujutus on vajalik, et tagada, et kõik marsruuterid värskendaksid oma andmebaasi enne uue tehnoloogia kajastava värskenduse marsruutimise tabeli loomist. OSPF-protokoll on näite linki oleku marsruutimine.
Vahemaadevahelise vektori marsruutimise ja lingi oleku marsruutimise peamised erinevused
- Bellman-Fordi algoritmi kasutatakse vahemaa vektori marsruutimise teostamiseks, samas kui Dijsktra kasutatakse lingi oleku marsruutimiseks.
- Kaugvektoris saadavad marsruuterid marsruuterid topoloogilist teavet naabri seisukohast. Vastupidi, linki oleku marsruutimisel saab marsruuter täieliku informatsiooni võrgu topoloogia kohta.
- Kaugvektorite marsruutimine arvutab parima marsruudi kauguse põhjal (vähim humalite arv). Seevastu linki riigi marsruutimine arvutab parima marsruudi kõige väiksema hinna alusel.
- Lingi oleku marsruutimine värskendab ainult lingi olekut, samal ajal kui kaugus vektori marsruutimine värskendab täielikku marsruutimistabelit.
- Ajakohastamise sagedus mõlemas marsruutimistehnikas on perioodiliselt erinev kaugusevärskenduse uuendamine, samas kui linki oleku värskendussagedus kasutab käivitatud värskendusi.
- CPU ja mälu kasutamine vahemaa vektori marsruutimises on madalam kui lingi oleku marsruutimine.
- Vahemaa vektori marsruutimine on lihtne rakendada ja hallata. Seevastu linki oleku marsruutimine on keeruline ja vajab koolitatud võrguhaldurit.
- Lähenemisaja vektori marsruutimises on aeglane ja tavaliselt kannatab see lõpmatuse probleemini. Seevastu on linkide oleku marsruutimises lähenemise aeg kiire ja see on usaldusväärsem.
- Kaugvektoril ei ole hierarhilist struktuuri, samas kui linki olekus võib marsruutidel olla hierarhiline struktuur.
Järeldus
Kaugvektoril suunatakse marsruutimisjaotus, kogu autonoomse süsteemi teave ja teave jagatakse ainult naabritega. Teisest küljest jagavad marsruuterid linki olekus marsruuterid teadmisi ainult oma naabritest ja teavet jagatakse kõigi ruuteritega.